
•
•
•
•
•
Інтерфейс шини CAN KAmod MCP2518FD для Raspberry Pi 5, швидкість до 8 Мбіт/с, 4-провідний SPI, розміри 65x30 мм, з резистором 120


Характеристики та опис
Користувальницькі характеристики
| Підходить | Raspberry Pi 5/4/3/2/1 A/B, Zero/Zero 2 H/WH |
опис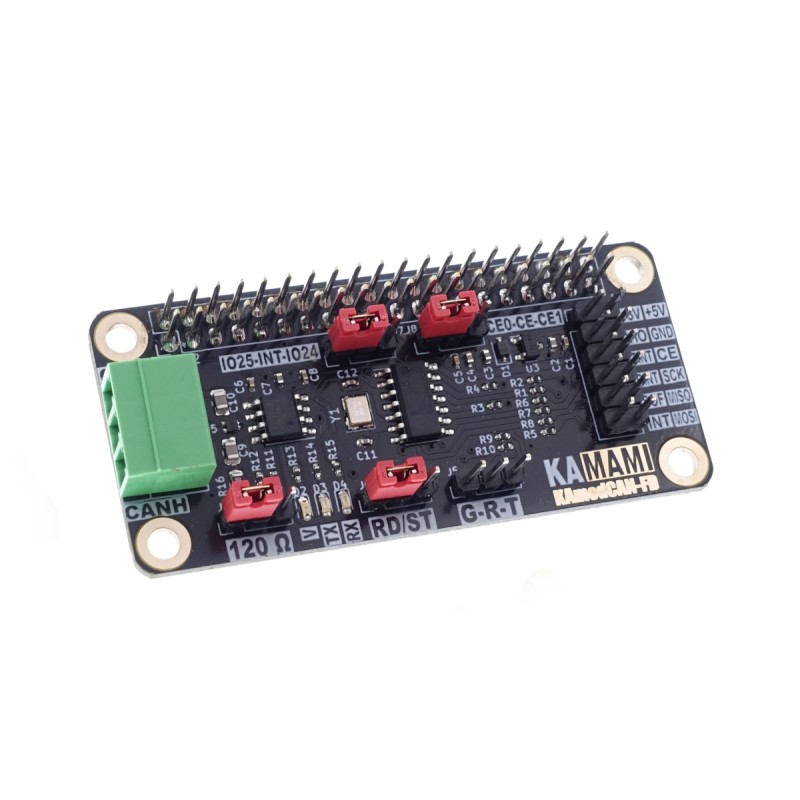 Властивості
Властивості
KAmod CAN-FD — це повноцінний інтерфейс шини CAN на основі розширеного контролера CAN MCP2518FD. Використовувана система відповідає за формування правильних кадрів, що надсилаються на шину, і буферизацію даних, які надсилаються до та з шини CAN. Завдяки цим функціям він може працювати практично з будь-яким комп’ютером або мікроконтролером SBC. Зв’язок на стороні CAN може відбуватися на швидкості до 1 Мбіт/с у режимі CAN 2.0 або до 8 Мбіт/с у режимі CAN FD. Зв'язок з контролером здійснюється через 4-провідний інтерфейс SPI (MISO, MOSI, SCK, CE) і додатковий сигнал переривання (INT). Усі сигнали направляються на 40-контактний роз’єм, щоб 2 модулі могли працювати одночасно з одним комп’ютером Raspberry Pi 5.
- Інтерфейс шини CAN, сумісний з CAN 2.0 і CAN FD
- В його основі лежить CAN контролер типу MCP2518FD
- Зв'язок через інтерфейс SPI з максимальною тактовою частотою 20 МГц
- Інтерфейс SPI працює на 3,3 В або 5 В
- Швидкість зв'язку (бітрейт): 125 кбіт/с...1 Мбіт/с (500 кбіт/с...8 Мбіт/с у режимі FD)
- Кінцевий резистор 120 Ом включений
- Світлодіоди, що вказують на правильне живлення та зв'язок
- Сумісний із платами Raspberry Pi 5 і Raspberry Pi Zero
- Можливість підключення двох модулів до одного комп'ютера (зв'язок через один інтерфейс SPI з окремими лініями CE0/CE1)
- Лінії шини CAN підключаються через роз'єм Phoenix MC 3,81 мм
- Захист від перенапруг на лініях шини CAN
- Джерело живлення 5В, 100мА
- Розмір дошки 65x30 мм, висота бл.25 мм
- Зібраний і запущений модуль
- Набір шурупів і прокладок для прикручування кришки до плати Raspberry
Інтерфейс шини CAN KAmod MCP2518FD для Raspberry Pi 5, швидкість до 8 Мбіт/с, 4-провідний SPI, розміри 65x30 мм, з резистором 120
В наявності
1 587 ₴
Способи оплати
Безпечна оплата
- Як післяплата, тільки без переплат
- Повернем гроші, якщо щось піде не так
- Bigl гарантує безпеку
Нова Пошта
Способи доставки
Нова Пошта — від 70 грн
Умови повернення
Уточнюйте у продавцяІнші товари продавця
Дивіться також
Новинки в категорії Набори та компоненти для самостійного збирання електроніки
Улюблені товари покупців
Чат