


Основной
| Производитель | FlySky |
Пользовательские характеристики
| Выходной ток | 7 А |
| Количество каналов | 2 |
| Напряжение питания до | 5 мая |
| Напряжение питания от | 2,5 В |
modAR3201-F2 предназначен для беспроводного управления приводом в легких радиоуправляемых конструкциях, таких как миниатюрные транспортные средства, мобильные роботы и летающие модели массой 25-100 г. Модуль объединяет RC-приемник FlySky AFHDS 2A и два независимых контроллера щеточных двигателей на одной плате, что позволяет напрямую управлять двумя двигателями без использования внешних ESC.
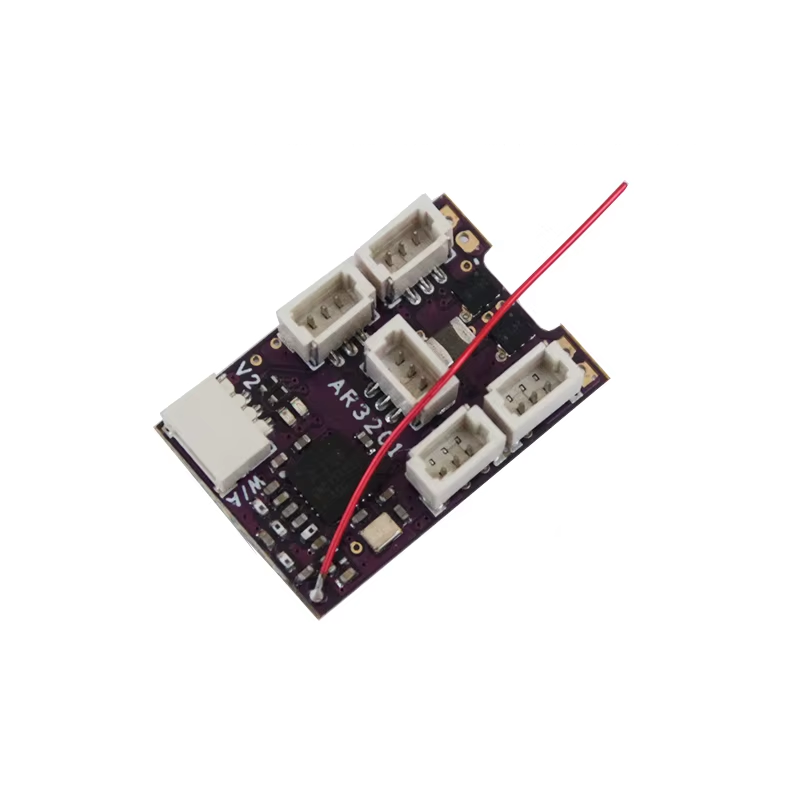
Использование двух контроллеров позволяет реализовать дифференциальный привод, при котором скорость левого и правого двигателей регулируется независимо. Решение хорошо работает на колесных и гусеничных машинах, где поворот необходим из-за разницы скоростей движения. Встроенный преобразователь постоянного тока в постоянный обеспечивает стабильное напряжение 5 В для питания вспомогательной электроники.
Модуль поддерживает вывод RSSI и обновление прошивки, что упрощает настройку и интеграцию с современными системами радиоуправления. Его очень малый размер и небольшой вес позволяют устанавливать его в конструкциях с ограниченным пространством, не оказывая существенного влияния на баланс массы.
Характеристики- RC-приемник и средства связи
- Встроенный радиоприемник: FlySky AFHDS 2A
- Поддержка оборудования FlySky
- Выход RSSI
- Поддержка обновления прошивки
- Управление двигателем
- Количество регулирующих органов: 2
- Тип двигателя: Щеточный двигатель постоянного тока
- Количество каналов: 2 (2 × ESC для коллекторных двигателей)
- Максимальный ток двигателя: 7 А на канал.
- работа дифференциального привода
- Источник питания
- Напряжение питания: 2,5–5 В постоянного тока (1S LiPo)
- Встроенный преобразователь постоянного тока: 5 В 1 А
- При питании от внешнего BEC никаких ограничений нет.
- Физические параметры
- Размеры: 22 x 16 x 6 мм
- Вес: около 1,5 г
- Предназначен для лёгких радиоуправляемых моделей.
- Приложения
- Миниатюрные радиоуправляемые машинки с дифференциальным приводом
- Мобильные и обучающие роботы
- Радиоуправляемые модели весом 25–100 г.
- DIY-проекты с оборудованием FlySky
- Компактные мобильные платформы и экспериментальные мобильные конструкции




