
•
•
•
•
•
Плата управления для робота Balboa 32U4 Arduino, микроконтроллер ATmega 32U4, IMU, H-мост, интеграция с Raspberry Pi


Характеристики и описание
Основной
| Производитель | Arduino |
Описание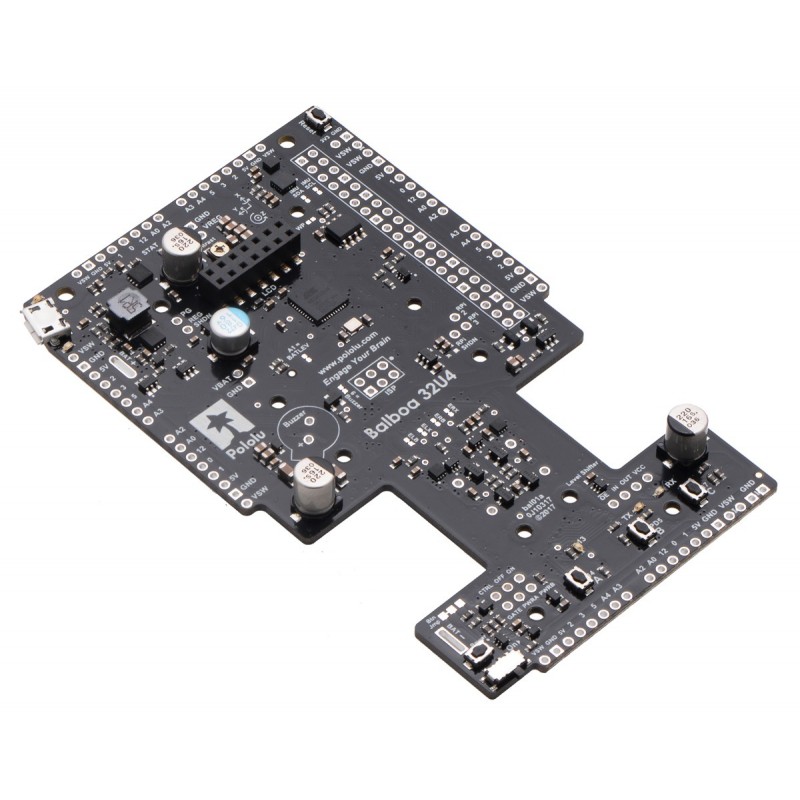
 Характеристики
Характеристики
Плата управления для робота Balboa 32U4. Он в первую очередь предназначен для замены частей балансирующего робота Balboa 32U4, но его также можно комбинировать с комплектом для переоборудования шасси Balboa с функцией стабилизации, чтобы создать собственного робота Balboa 32U4.
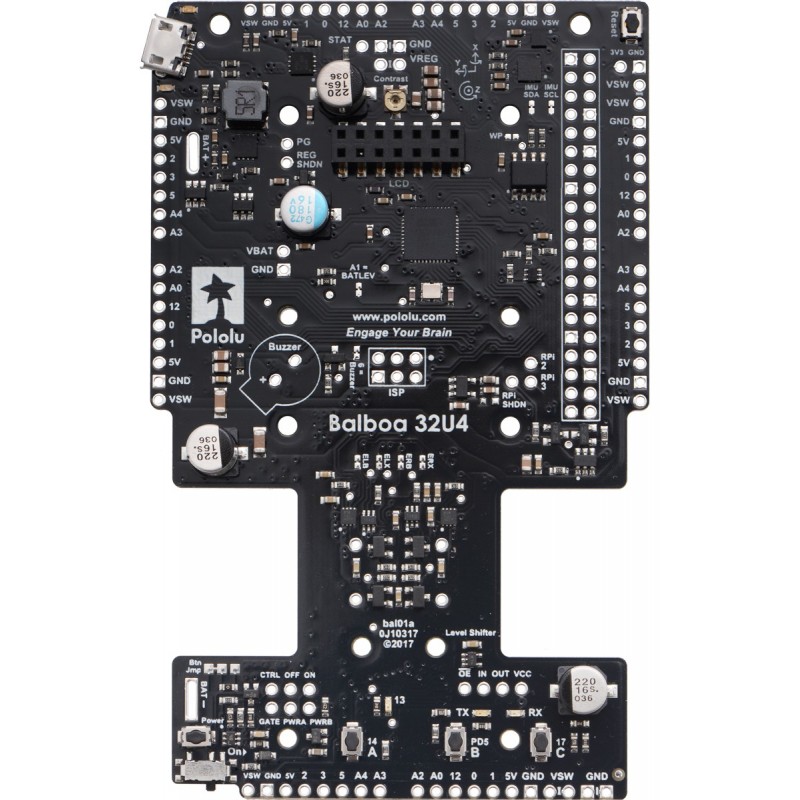
Модуль управления построен на базе микроконтроллера ATmega 32u4, который можно программировать в среде Arduino IDE. Плата также включает в себя двойной H-мост для управления двигателем, квадратурные энкодеры и измерительный блок IMU (3-осевой акселерометр, гироскоп и магнитометр). Благодаря вышеперечисленным элементам можно создать робота, балансирующего на двух колесах. Соответствующий разъем позволяет осуществить интеграцию с мини-компьютером Raspberry PI.
- Микроконтроллер Atmega 32U4
- Двухканальный контроллер двигателя постоянного тока
- Квадратурные энкодеры
- Инерциальный датчик IMU (3-осевой акселерометр, гироскоп и магнитометр)
- Разъем для интеграции с компьютером Raspberry Pi
- светодиоды
- Зуммер
- Понижающий стабилизатор 2А/5В
- Плата Balboa с микроконтроллером Atmega 32u4
- Зуммер
- Две опоры двигателя
- Два магнитных диска для энкодеров
- Пластины отсека для батареек
- Набор винтов
Плата управления для робота Balboa 32U4 Arduino, микроконтроллер ATmega 32U4, IMU, H-мост, интеграция с Raspberry Pi
Готово к отправке
6 482 ₴
Способы оплаты
Безопасная оплата
- Как наложенный платеж, только без переплат
- Вернем деньги, если что-то пойдет не так
- Bigl гарантирует безопасность
Нова Пошта
Способы доставки
Нова Пошта — от 70 грн
Условия возврата
Уточняйте у продавцаДругие товары продавца
Смотрите также
Новинки в категории Наборы и компоненты для самостоятельной сборки электроники
Любимые товары покупателей
Чат