
•
•
•
•
•
•
BNO055 - модуль 9DoF IMU з чіпом Bosch BNO055 7945


Характеристики та опис
Основні
| Виробник | Bosch |
| Стан | Новий |
Користувальницькі характеристики
| Інтерфейс | I2C |
| Напруга живлення | 2,4 - 5,5 В |
| Тип датчика | Акселерометр, гіроскоп і магнітометр |
опис
 Властивості
Властивості
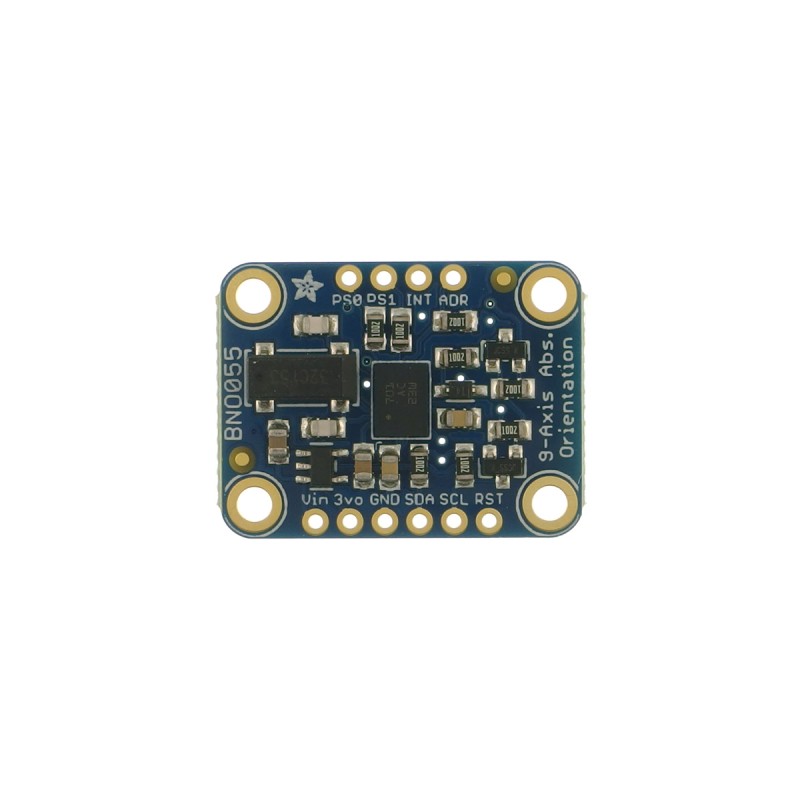
Удосконалений 9-осьовий IMU (акселерометр + гіроскоп + магнітометр), який виконує автономне об'єднання даних. На відміну від традиційних 9-ступінчастих датчиків, BNO055 має вбудований мікроконтролер ARM Cortex-M0, який перетворює необроблені дані в готову просторову орієнтацію.
Це дозволяє користувачеві безпосередньо отримувати 3D-орієнтацію (кути Ейлера або кватерніони), вектори прискорення, кутові швидкості та вектори сили тяжіння — без необхідності впровадження складних алгоритмів. Зв'язок здійснюється через I²C, що дозволяє модулю запустити та працювати за лічені хвилини, навіть на простих мікроконтролерах (Arduino, ESP, Raspberry Pi).
- Тип датчика: 9-DOF IMU (акселерометр + гіроскоп + магнітометр)
- Вбудований процесор: ARM Cortex-M0 (об'єднання датчиків в апаратному забезпеченні)
- Інтерфейс: I²C
- Адреса I²C: 0x28 (за замовчуванням) або 0x29
- Доступний вихід:
- Абсолютна орієнтація – Ейлер (100 Гц)
- Абсолютна орієнтація – кватерніони (100 Гц)
- Кутова швидкість (рад/с, 100 Гц)
- Загальне прискорення (м/с², 100 Гц)
- Лінійне прискорення (без гравітації, 100 Гц)
- Вектор сили тяжіння (100 Гц)
- Напруженість магнітного поля (мкТл, 20 Гц)
- Температура навколишнього середовища (1 Гц)
- Джерело живлення: 3-5 В (вбудований стабілізатор 3,3 В)
- Логічні рівні: перетворення рівнів для I²C та скидання
- зовнішній резонатор 32,768 кГц (рекомендований Bosch)
- Виведені контакти RESET та INT
- Розміри: 20 × 27 × 4 мм
- Вага: приблизно 3 г
- 1 × Модуль розгалуження Adafruit 2472 – BNO055 з 9 ступенями свободи
- 1 × смужка із золотими штифтами (для самостійного паяння)
З'єднувальні кабелі та мікроконтролер не входять до комплекту
BNO055 - модуль 9DoF IMU з чіпом Bosch BNO055 7945
Готово до відправки
3 862 ₴
Способи оплати
Нова Пошта, Самовивіз
Способи доставки
Нова Пошта — від 60 грн
Самовивіз
Умови повернення
Повернення товару впродовж 14 днів за рахунок покупцяІнші товари продавця
Подібні товари інших продавців
Дивіться також
Новинки в категорії комплектуючі для опалювального обладнання
Улюблені товари покупців
Чат